



レーダー速度計付きLED標識
| ピクセルピッチ | P4-P5-P10 |
|---|---|
| キャビネットサイズ | 640*960mm、64*1280mm、 |
| モジュールサイズ: | 320×160mm |
| リフレッシュレート: | 1920Hz |
| 力: | 最大:800W/平方メートル、平均:250W/平方メートル |
| 防水 : | IP65 |
| 輝度: | 6000cd |
| 入力電圧: | 110~220V |
レーダースピードLEDスクリーンの構成と機能
レーダー速度測定フィードバック LED スクリーンは、速度標識板、マルチレーン高精度フラットパネルレーダー、LED ディスプレイの 3 つの部分で構成されています。
車両がレーダー速度フィードバック計器の約10~200メートル手前に入ると、LEDディスプレイに車両の速度が表示されます。このエリアに複数の車両が同時に走行している場合は、LEDディスプレイにはこれらの車両の中で最高速度の車両速度が表示されます(最も近い表示モードを選択できます)。
レーダー速度スクリーン - 車両速度をリアルタイムで検出するLEDレーダー速度フィードバック計器
レーダー速度測定フィードバック画面システムは、専用のマルチレーン高精度マイクロ波レーダーを通じて速度測定を実現し、接近車両の速度と走行速度の変化をリアルタイムでフィードバックします。
レーダー速度測定フィードバックシステムは、固定速度カメラシステムと組み合わせることで、過去に標識に指定された速度に従わない速度違反車両を捕捉・特定し、法執行機関による処罰に備えることが可能です。
レーダー速度測定フィードバックシステムは、業界をリードする独自の技術的優位性を備え、高い速度測定精度、安定した品質、耐久性を保証します。LEDライトは低消費電力、長寿命、高輝度を実現します。レーダーは、マルチレーン高精度速度測定フラットレーダーを採用しています。速度測定誤差は100KM/H未満で1KM/H未満、100KM/H未満で2KM/H未満、199KM/H未満で2KM/H未満です。速度範囲は1~199KM/Hです。
トップシャインLEDレーダースピードサインのメリット

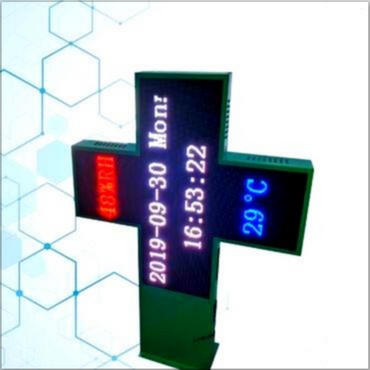
最高検知速度:199 km/h 速度制限表示モード:安全速度を設定すると、安全速度内では緑色の数字が表示され、速度超過時には赤色の数字が表示されます。対向車の速度のみを表示し、反対方向の車両の速度干渉を除外します。

レーダーとカメラを備えた速度制限 LED 標識。適用範囲: 都市高速道路、自動車専用道路、郊外連絡線、施設や大学などの速度制限のある道路区間。特に歩行者と車両が出会う道路区間、カーブ、スロープなどは安全上の事故が発生しやすいです。

標準画面表示は3桁の数字と7つのフィールドのデジタルワードで構成されています。表示画面のサイズは設計図に応じてカスタマイズでき、2色またはフルカラーのLED表示画面を選択できます。正常な視力を持つドライバーは、速度制限のない状態で150m離れた場所から表示内容を認識できます。LEDの色変化速度は設定可能です。
- データシート
1) 電力: 最大3W、電流0.25A未満
2) 内部速度測定精度:0.1km/h
3) アンテナタイプ:パネルアンテナ
4) レンズタイプ: 正確な地面反射
5) 極性:正のサイクル
6) ビーム幅:5.5度
7) レーダー周波数 kバンド(24G)
8) 検出可能距離:10~399m
9) 応答時間: 10ms
10) 出力: 15W LEDディスプレイ:
レーダー速度 LED サイン システムの基本的な動作手順:
(1)車両がレーダーの探知エリアに入ること
(2)マイクロ波レーダーが車両の速度を検知する。
(3)表示コントローラは、車両の速度を表示するためにLEDディスプレイを制御する。
(4)複数の車両速度が検出された場合には、最高速度が表示されます。
(5)検出された車両速度が制限速度より低い場合、緑色の表示で車両速度を検出する。
(6)検出された車両速度が制限速度を超えている場合、検出された車両速度は赤色で表示されます。
関連製品
あらゆる LED スクリーンのニーズにワンストップで対応します。




レーダー速度標識はカメラでどのように機能しますか?
レーダー速度測定LEDサインは、マイクロ波を用いて移動体の速度を測定します。レーダーから発射されたマイクロ波は散乱し、照射範囲内の目標物にマイクロ波反射波を形成します。これにより、検知率を算出します。車両のリアルタイム速度を表示します。
1.実際の測定要件に応じて、レーダー速度測定LED画面は2つの動作モードに分かれています。
(1)静的動作モード
つまり、レーダーは移動パトカーに搭載されているのではなく、静止した状態で、対向車や同じ方向に走行する車を検知します。
(2)ダイナミックワーキングモード
移動中、レーダーは通常、移動パトカーに搭載され、前方に来る車両または同方向に移動する車両を検知します。動的動作モードでは、テストは一般的に逆方向測定と同方向測定に分けられます。逆方向測定とは、テスト対象がパトカーの進行方向と反対方向にあることを指し、同方向測定とは、テスト対象がパトカーの進行方向と同じ方向にあることを意味します。
レーダー速度測定LED画面は、異なる試験状況に応じて異なる演算規則を用いていますが、レーダー自体が目標物の方向を特定することは容易ではありません。従来のレーダー速度測定計は、技術的な制約により、目標物の移動方向を特定できませんでした。そのため、測定エリア内に同方向と反対方向の2台の車両が存在する場合、レーダーは試験対象がどちらの車両であるかを判別できませんでした。技術の発展により、一部の新型速度測定レーダーは目標物の移動方向を認識できるようになり、試験の信頼性と信用性が大幅に向上しました。
レーダー速度計の原理:1. 交差点に設置されたカメラを用いて、赤信号を通過するドライバーを撮影する技術は、実に多様です。統一された基準や方法はなく、入札の設計施工部門の判断に委ねられています。2. レーダー、誘導コイル、画像認識など、様々な技術を用いて作動させることができます。レーダートリガーモードを使用する場合、赤信号が点灯すると、駐車帯の前方にレーダーエリアが形成されます。車が接近している場合は、電子シャッターが作動して撮影を行い、その後レーダー速度計が作動する場合があります。道路下では、車が赤信号を通過すると、誘導コイルが電子シャッターを作動させて撮影を行います。画像認識技術を使用する場合、地面の白線を警戒エリアとして使用します。車が接近している場合は、カメラが地面の白線を遮って作動します。4. 技術の違いにより、赤信号を完全に予測して撮影できる機器はありません。速度測定にはレーダーまたはレーザー技術のみが使用されるため、レーダー速度計は予測可能です。
1. レーダーLEDスクリーンは目標車両の半径速度を測定しますが、実際には目標車両の進行方向と半径の間には常に角度αが生じます。理論的には角度αが小さいほど良いのですが、レーダーの作動距離(通常800メートルから1000メートル)の制限と他車両の影響により、一般的な制御角度は左右約5°です。
2. 測定は平坦な道路から始めるのが最適です。パトロール車両の速度は時速50キロメートルを超えないようにしてください。同時に、前方の近距離、反射板や工場の障害物に注意してください。
3. レーダーを固定する際は、道路の右側に沿って設置し、アンテナは地面から約0.6メートルの高さにしてください。また、アンテナの発射方向は道路と平行にしてください。
4. 固定設置で使用する場合、通常は2方向の測定が可能です。ただし、車両が多い場合は、レーダーの発射方向から遠い前方方向の目標を測定することをお勧めします。また、他の車両の影響を受けないように、作動距離を短くする必要があります。
5. LEDレーダー速度計から発射されるマイクロ波ビームには一定の発散角があります。使用の際は、他の車両への影響にご注意ください。車両からの反射ビームは地面からの反射ビームよりもはるかに強いため、画面に表示される速度は、パトカーの地面に対する速度ではなく、パトカーのトラックに対する速度です。このとき、ターゲット車両ディスプレイのデータは記録されません。また、高速走行車両がパトカーを追い越した場合、ターゲット車両ディスプレイのデータは記録されません。
6. 金属反射マイクロ波の能力は強力です。パトカーでレーダーを使用する場合は、大きな金属標識や金属製ガードレールの影響に注意してください。
7. 高圧電線、無線塔、車両の点火装置はレーダーに干渉を引き起こす可能性があります。ユーザーは干渉の影響を排除するために常に監視を行う必要があります。
8. 雨、雪、霧のときはレーダーの動作距離を短くし、データを注意深く観察する必要があります。大雨や大雪のときは機器を開けないでください。
9.レーダー速度計を勝手に分解しないでください。